紙箱的使用遍及了各行各業,應用範圍非常廣泛。因此紙箱搬運碼垛機器人/機械手也成為了機器人中常見的應用。不同的紙箱可(kě)能就需要不一樣的機器人,同(tóng)樣也需要不一樣(yàng)的配(pèi)件例如:機器人夾具。
機器人夾具是機器人/機械手搬運碼垛應用的重要部分,它承擔起了機器人與產(chǎn)品搬運之間的橋梁,單獨的機器人與適(shì)配的夾具抓(zhuā)手(shǒu),機器人才能實現抓住產品與放置產品的動作(zuò)。
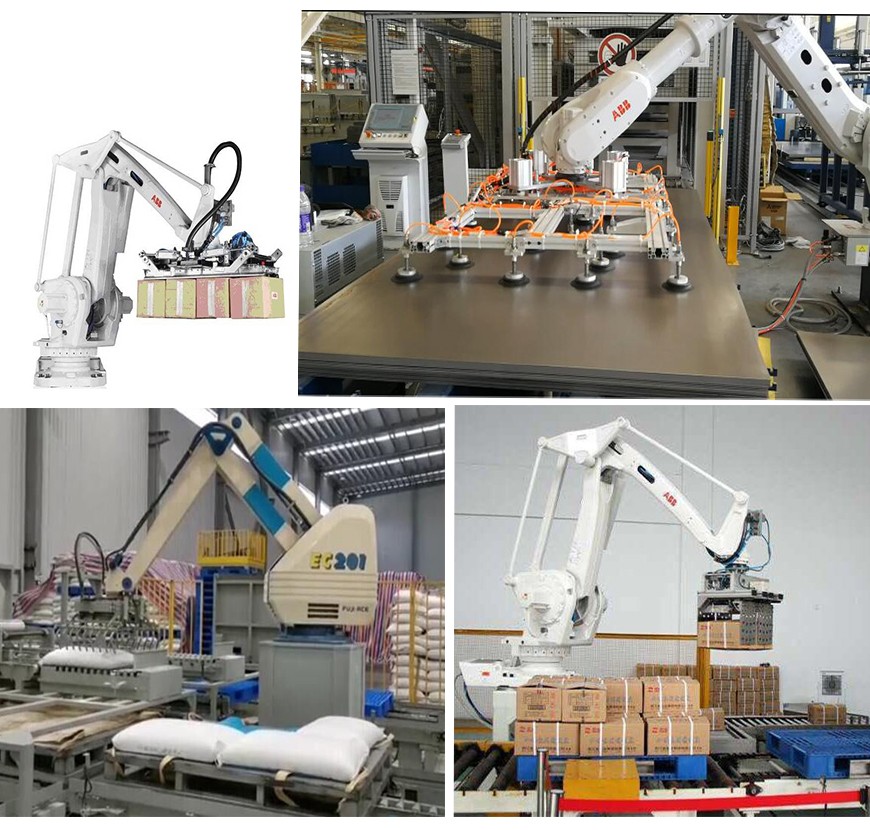
因為夾具是需要產品進行(háng)調整,因此一般都是定製的,但是目前公司有部分標準(zhǔn)夾具。紙箱搬(bān)運碼垛(duǒ)的機器人夾具目前主要分(fèn)為兩種:一(yī)種是抱夾式(shì)夾具,另一種是吸(xī)盤式夾具。先說吸盤式夾具是采用多(duō)個吸盤結構,在產品一個麵吸附,然後機器人進行搬運碼垛,具有輕拿輕放(fàng)的特點,是目前比較(jiào)受歡迎的夾具。抱夾(jiá)式夾具測試采用方形鐵板兩邊夾住產品,然後(hòu)再一邊的排齒扣在紙箱下方,以防(fáng)止在(zài)夾力度不夠的時候,發(fā)生掉落情況。
不(bú)管是(shì)夾抱式夾具還是吸(xī)盤式(shì)夾具都有(yǒu)各自的局限性,夾抱(bào)式的動作會比較重,而吸盤式夾具比較(jiào)適合平麵麵積大,重量較輕的產品。
草莓污视频APP自(zì)動化訂做各類機器人配件,自主(zhǔ)設(shè)計,生產。目前公司有機器人應用與集成,機器人配件定製(zhì),非標設備定製。