| 型號: | YD-ZDH-JJ001 |
| 產品別稱: | 紙(zhǐ)箱夾具(jù),機器人抓手,機器人抓手夾具 |
| 定(dìng)製設計生產: | 是 |
| 材質: | 鋼材(cái)等 |
| 貨期: | 根據(jù)情況 |
| 廠家: | 是 |
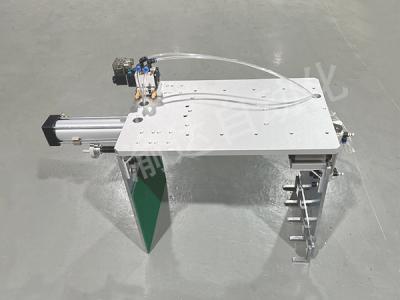
30kg紙箱機器人碼垛抱夾夾具產品介紹:此夾具是靠四部步(bù)進電機進行驅動,配(pèi)套滾珠絲杆、精密導軌和吸盤,根據(jù)客(kè)戶的產(chǎn)品,調節合適的抱夾行(háng)程,夾具到達產品定位位(wèi)置後,吸盤將產品吸住抬起,氣缸驅動抱爪將產品固定在夾具上,後搬運到指定位置。
產品規格:L1150*W550*H460
材質:鋼材等
負載:20-30kg
適配機器人型號:可定製不(bú)同機器人的連接法(fǎ)蘭,也可以配套桁(héng)架
可定(dìng)製(zhì)部分:長寬高

功能介紹特點(diǎn):
1、係統程序控製(zhì):夾具係統與(yǔ)配套機器人或(huò)桁架的信號接口及係統(tǒng)接口采用數字或PLC控製信號傳輸,從而保證(zhèng)互相之間的穩(wěn)定性及牢靠性。具備(bèi)手動和自動兩種運轉控(kòng)製方式, 手動方式下可單獨操作某一(yī)個工序,自動方式下按設定的運轉程序自動運轉。
2、急(jí)停連鎖功用:隨意激起任何一個急停按(àn)鈕,夾具可以立(lì)刻中止正在完(wán)成的動作,隻要在該急停重新(xīn)複位後設備(bèi)才恢複正常運轉(zhuǎn)。
3、移動與定位:可經(jīng)過操作麵(miàn)板及顯現屏直接(jiē)編輯,理論上在直線軸(zhóu)有效行程範圍內,經過步進電機(jī)和滾珠絲杆,精度在±0.5mm範圍之內(nèi)。